Introduction
Single-phase induction motors are the most familiar of all electric motors because they are used in home appliances, businesses, and small industries. In general, they are employed when three-phase power is not available. Single-phase induction motors are usually two-pole or four-pole, rated at 2 hp or less, while slower and larger motor can be manufactured for special purposes. They are widely used in domestic appliances and for a very large number of low power drives in industry. The single phase induction motor resembles, three-phase, squirrel-cage motor except that, at full speed, only a single winding in the stator is excited.
In a single-phase motor we have only a single field winding excited with alternating current; therefore, it does not have a revolving field like three-phase motors. Thus, it does not self-starting. Several methods have been devised to initiate rotation of the squirrel-cage rotor and the particular method employed to start the motor will designate the specific type.
Principle of operation
Synchronous Speed
 (1)
(1)
Where ns= synchronous speed [rpm]
f = frequency of the source [Hz]
p = number of poles
The rotor turn at slightly less than synchronous speed, and the full-load slip is typically 3 percent to 5 percent for fractional horsepower motors.
Torque-Speed Characteristic
Figure 1 is a schematic diagram of the rotor and main winding of a two-pole single-phase induction motor. Suppose the rotor is locked, if an ac voltage is applied to the stator, the resulting current Is produces an ac flux Fs. The flux alternates back and forth but, unlike the flux in three-phase stator, no revolving field is produced. The flux induces an ac voltage in the stationary rotor which, in turn, creates large ac rotor currents. In effect, the rotor behaves like the short-circuited secondary of a transformer; consequently, the motor has no tendency to start rotating by itself. However, if we spin the rotor in one direction or the other, it will continue to rotate in the direction of spin and the rotor quickly accelerates until it reaches a speed slightly below synchronous speed. The acceleration indicates that the motor develops a positive torque as soon as it begins to turn. Although the starting torque is zero, the motor develops a powerful torque as it approaches synchronous speed.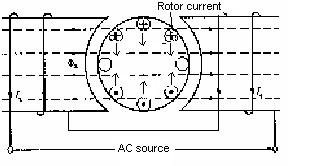
Fig.1 (a) Currents in the rotor bars when the rotor is locked

Principle of Operation
Cross-field theory
The principle of operation of a single-phase induction motor can be explained from the cross-field theory. As soon as the rotor begins to turn, a speed emf E is induced in the rotor conductors, as they cut the stator flux Fs. This voltage increases as the rotor speed increases. It causes current IR to flow in the rotor bars facing the stator poles as shown in Fig. 2

Fig. 2 Current induced in the rotor bars due to rotation
These currents produce an ac flux FR which act at right angle to the stator flux Fs. Equally important is the fact that FR does not reach its maximum value at the same time as FS does, in effect, FR lags almost 90o behind FS, owing to the inductance of the rotor
The combined action of Fs and FR produces a revolving magnetic field, similar to that in a three-phase motor. The value of FR increases with increasing speed, becoming almost equal to Fs at synchronous speed. The flux rotates counterclockwise in the same direction as the rotor and it rotates at synchronous speed irrespective of the actual speed of the rotor. As the motor approaches synchronous speed, FR becomes almost equal to Fs and a nearly perfect revolving field is produces.
Double-revolving field theory
The principle of operation of single-phase induction motor can also be explained by double revolving field theory.
The single-phase supply given to the single-phase winding will produce pulsating field in the air gap. However, any pulsating field can be resolved into two components, equal in magnitude but oppositely rotating, as shown in Fig. 3.

The maximum value of each component is one-half of f . This method of analysis is commonly known as the double-revolving field theory. Each field component acts independently on the rotor and in a fashion similar to that of the rotating field in a three-phase motor. The clockwise component produces the torque characteristic Tcw while the counterclockwise component produces the torque Tccw as shown in Fig. 4

Fig. 4 Torque-speed characteristic of a single phase motor
Observe that the resultant torque is zero at standstill. But, if the rotor were rotated slightly in any direction, a net torque will result and the motor will continue to rotate in that direction. For example, if the rotor is started in the clockwise direction, the torque Tcw will exceed Tccw and the rotor will accelerate in that direction and reach the steady-state speed near synchronous speed at a slip dictated by the load.
Non-self starting is not a desirable feature in practice, and modifications are introduced to obtain the staring torque. To produce rotating magnetic field at starting an auxiliary winding is placed in the motor. Using this auxiliary winding a quadrature flux component in time and space with the stator main flux can be produced.
Starting methods for single-phase induction motors
The various forms of a single-phase induction motor are grouped depending on the starting methods used.
Split-phase induction motor
One of the most widely used single-phase induction motor is the split-phase induction motor. It is used in refrigerators, washing machines, portable hoists, many small machine tools, blowers, fans, centrifugal pumps and many others. The essential parts of the split-phase motor are shown in Fig. 5.

Fig. 5 Single-phase split-phase motor
Fig 6 Typical torque-speed characteristic of a split-phase motor.
Capacitor-start motors
If a capacitor is connected in series with the starting winding, the phase angle between the two winding currents will become more than 30o (about 80o) that is obtained in the split-phase motors. This increase in phase angle will increase the starting torque. Figure 7 shows the capacitor-start motor and the typical torque-speed characteristic. Because of their higher starting torques, capacitor-start motors are used in applications where not only higher starting torques are required, but also where reversible motors are needed. Typical applications are; washing machines, belted fans and blowers, dryers, pumps, and compressors.

Fig 7(a) Circuit diagram of a capacitor-star motor

Fig. 7(b) Torque-speed characteristic of a capacitor-start motor
Permanent-split capacitor motor
In this motor, the capacitor in series with the auxiliary winding is not switched out after starting. It remains in the circuit, therefore the centrifugal switch is not needed. Since the capacitor and the auxiliary winding are in the circuit continuously, they should be properly designed.
Capacitor-start capacitor-run motors
Here two capacitors are used one for starting and one for running. Theoretically optimum starting and running performance can both be obtained. The small value of capacitance required for optimum running is permanently connected in series with the auxiliary winding, and the much larger value required for starting is obtained by connecting another capacitor parallel to the running capacitor. The starting capacitor is disconnected after the motor starts.
Shaded-pole motors
The least expensive of the fractional-horsepower motors, generally rated up to 1 hp, are shaded-pole motors. They have salient stator poles, with one-coil-per-pole called main winding. The auxiliary winding consists of one (or rarely two) short-circuited copper straps wound on a portion of the pole and displaced from the center of each pole, as shown in Fig.8(a). The shaded-pole motor got its name from these shading bands. Induced currents in the shading coil cause the flux in the shaded portion of the pole to lag the flux in the other portion in time. The result is then like a rotating field moving in the direction from the unshaded to the shaded portion of the pole. A low starting torque is produced; a typical torque-speed characteristic is shown in Fig. 8(b). Shaded-pole motors have a rather low efficiency.
{kind=link}

Fig. 8 (a) Shaded pole motor (b) Torque-speed Characteristics
Repulsion-induction motors
Before low-cost capacitors became available, repulsion-start and induction-run machines were the most widely used kind of single-phase motor in the range of 1/3 to 5 hp. This kind of motor has distributed rotor-windings connected to a commutator (like a dc machine) with short-circuited brushes and a distributed single-phase stator winding in the direct axis only. Repulsion-start motors have a centrifugal device that short-circuits all the commutator segments when the motor comes up to speed and lifts the brushes off the commutator. The permanently short-circuited rotor brushes are displaced from the direct axis by an angle of less than 90 electrical degrees so a rotor current is induced by transformer action. The flux produced by this current, which is fixed in position, acts with the main winding flux to create a torque.
To avoid the centrifugal mechanism, some widely used repulsion-induction motors were designed with an additional deeply buried, low-resistance squirrel cage in the rotor to limit the no-load speed to a little above synchronism. Such machines fall under the general category of ac commutator machines; however, they have been replaced by capacitor motors.
Equivalent circuit
A single-phase motor receives its power from a single-phase source of defined voltage and frequency. This source causes a current to flow in the stator winding which will create an mmf. According to electromagnetic principles, this mmf can be resolved into two revolving mmfs, rotating in opposite directions. If the rotor is rotating at speed nR, the component mmf rotating in the same direction as the rotor is called the forward-revolving field, and the oppositely rotating mmf is called the backward-rotating field. Each rotating mmf induces a voltage in the rotor winding. Therefore, two equivalent circuits are built: one for the forward component mmf and one for the backward-rotating component field. Then, the two component fields are combined and the two equivalent circuits are interconnected.


Fig 9. Equivalent circuit corresponding to the forward mmf
Next, the backward component field is considered. The stator current corresponding to this field is one half of the stator current, that is (½)I1. because the rotor and the backward fields are rotating in opposite directions, the slip s- of the rotor with respect to the backward-rotating field is expressed as:

Therefore, from (3.2)
s- = 2 - s+...... 4
The equivalent circuit corresponding to the backward-revolving field is shown in Fig. 10.

The terminal voltage may be expressed in terms of its components:
Since one half of the current I flowing in an impedance Z has the same performance effect as the current I flowing in the impedance (½)Z, the equivalent circuits shown in Figs. 9 and 10 may be combined to form the overall equivalent circuit shown in Fig. 11. In this equivalent circuit, the resistances are combined into R1, and the reactances are also combined into X1. This equivalent circuit can be used to analyze the performance of a single-phase induction motor.

To make the calculation simpler, let us define impedances ZF and ZB as

The current flowing in the induction motor’s stator winding is then given by
The air-gap power for the forward magnetic field can be expressed as
PAG,F = I12(0.5 RF) 9
Similarly, the air-gap power for the reverse magnetic field can be expressed as
PAG,B = I12(0.5 RB) 10
The total air-gap power in a single-phase induction motor is thus
PAG = PAG,F – PAG,B 11
Power converted Pconv = (1 –s) PAG 13
Power output can be obtained by subtracting core losses, mechanical losses and stray losses from power converted.
Applications
Motors
|
General remark
|
Application
|
Split-phase motors
|
Have moderate starting torque with low starting current. Low cost.
|
Fans, blowers, centrifugal pumps and office equipment
|
Capacitor-start motors
|
High starting torque
|
Compressor, pumps, refrigeration and air-conditioning equipment, belt-driven loads and other loads requiring high starting torque
|
Permanent-split capacitor motors
|
Low starting torque. Quite running
|
Low starting torque load: Direct-connected fans and blowers
|
Capacitor-start capacitor-run motor
|
High starting torque and high power factor
|
Compressors, stokers, conveyors, and pumps
|
Shaded-pole motors
|
Low starting torque
|
Toys, small desk fans, hair dryers and other low-starting torque load
|
Operation of a three-phase induction motor on single-phase supply (Single-phasing)

5 comments:
warm Greeting
Have you been thinking about the power sources and the tiles whom use blocks
I wanted to thank you for this great read!! I definitely enjoyed every little bit of it and I have you bookmarked to check out the new stuff you post.
Single Phase Motor
I gone through your blog. Its really good.very useful information..Thanks for sharing this.
see my products also
Capacitor Winding Machine
Hi.. your blog is amazing. Nice to read. Very useful to all
Sesamin Extract Manufacturers
Thanks for your great tips. We all appreciate your tips......Induction Machine of Sunnerindia is now very popular product in India and also worldwide. Due its quality, durability and low cost it is mostly used by people and service industries. Our motto is to establish our brand image-for right application in every industry in our country and developing nations in the world.
Induction Machine
Post a Comment